
Rescue Robot ‘Sees’ With Drone Eyes
Nov 29, 2016Author:
Japanese researchers have developed a prototype disaster relief robot that comes with its own flying drone.

Rescue robot with tether powered drone (Image by Osaka University, http://resou.osaka-u.ac.jp/en/research/2016/20161111_1)
This robot may look like an ordinary hydraulic shovel, but it could just save your life in the event of a disaster. As part of the Impulsing Paradigm Challenge through Disruptive Technologies Program (ImPACT)’s Tough Robotics Challenge, a group of researchers at Osaka University, Kobe University, Tohoku University, Tohoku University, The University of Tokyo, and Tokyo Institute of Technology has developed a prototype construction robot that can be used for disaster relief.

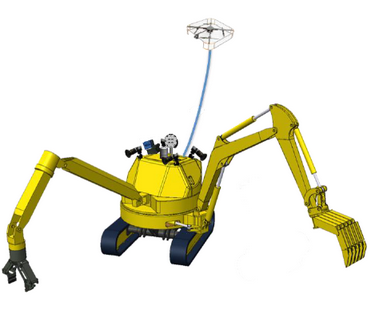
Rescue robot prototype (Image by Osaka University, http://resou.osaka-u.ac.jp/en/research/2016/20161111_1)
The prototype has drastically improved operability and mobility compared to conventional construction machines. It incorporates a wide range of emerging technologies, including sensitive measuring systems and a tethered drone that can replace the human operator.
Specifically, the rescue robot has technology that can estimate the external load in each hydraulic cylinder with multiple degrees of freedom. The estimated force will be used for force control or force feedback to the operator of the tele-operated rescue robot. The robot will also have a force sensor which can measure high frequency vibration and give the operator tactile feedback.
Conceptual sketch of rescue robot (Image by Osaka University, http://resou.osaka-u.ac.jp/en/research/2016/20161111_1)
In addition, the robot features a flying multi-rotor unmanned aircraft vehicle which can capture video, allowing the human operator to assess the area surrounding the robot. The four fish-eye cameras mounted on the drone are also equipped with far-infrared ray sensing capabilities that can view long-wavelength light, giving the operator the ability to see even under bad weather conditions like fog. Long flights and pin-point landing of the drone are made possible by electric lines and a power-feeding helipad. In addition to the above-mentioned technologies, the research group is also developing new robots with a double rotation mechanism and double arms to achieving higher operability and terrain adaptability. (Asian Scientist)